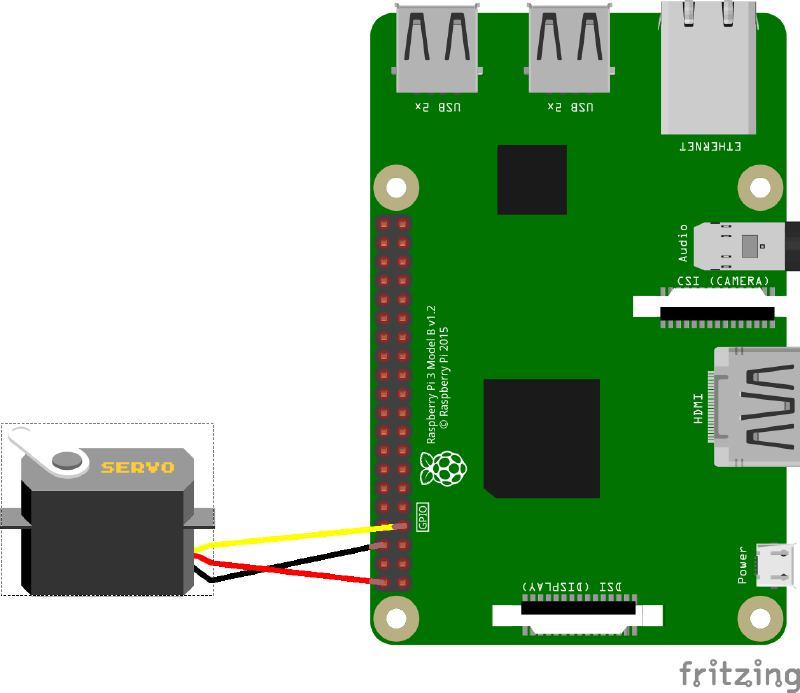
Building R2D2 Arms using RPI3.
ROS Actions. Similar to an ROS Service except you can do other things while the action is running. Actions are asynchronous.
A ROS service is a node that must run and you must wait until it has completed.
Notes about an ROS Topic. This will describe a basic publisher and subscriber topic. Where to find the list of topics and the list of possible messages for a topic. How to install a new message for a topic.
ROS Intel Euclid Install on Nvidia Jeston TX1